Experimenting with Different AI Techniques to Accurately Crop Identity Documents
by Boris Zimka, Principal Software Engineer
The content of this article is based on a presentation that the author delivered at DSC Europe.
The core idea of Occam's Razor is parsimony or simplicity. In various forms, it states that among competing hypotheses that predict equally well, the one with the fewest assumptions should be selected. In other words, the simplest explanation is usually preferred because unnecessary complexities and "entities" should not be assumed without necessity. This principle is a staple in scientific methodology, often guiding researchers to opt for theories with the simplest, most straightforward explanations.
This way of thinking also comes handy in different areas of engineering, specifically in AI engineering. In most cases, there can be many solutions for the same problem—and choosing the right one is not an easy task. We learned this deeply while experimenting to find the best possible solution to detect and crop identity documents in any shape or form, in every scenario imaginable…whether that’s a scan or a photo of a cat holding a passport.

Image generated using DALL-E.
Photographs of identification documents such as passports and ID cards are highly subject to geometrical distortion. We must remove the distortion by identifying the polygonal contours of the ID card/passport. To do this, we wanted to discover the most effective methods for cropping these documents. We tested several different techniques for identifying the polygonal contours of the documents to identify the most accurate and effective approach.
Approach #1: Projective transformation estimation
The first method we used to do this was based on projective transformation estimation. Since a rigid ID document is a rectangular segment of a 3D plane in 3D space, we must be able to map the document when the plane is skewed. For this, we need to train the neural network to predict projective transformation parameters. In this process, the network estimates the transformation parameters in such a way that the image corners are mapped into ground truth corners.
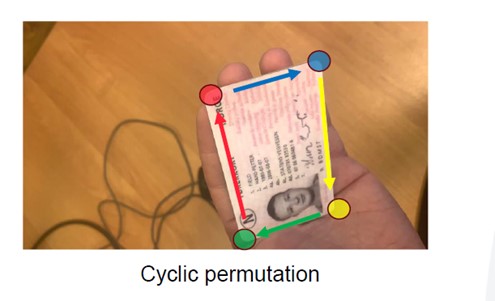
In most experiments, we used the Lite-HRNet architecture, a network that was used in research papers (see references below) to estimate the pose that a human being has in an image, and it delivers a good balance of quality and speed for this similar task. To make it work, we replaced the usual MSE loss with its circular version. Instead of minimizing one specific matching of key points, we minimize the best possible matching, which is defined by circular rotation.
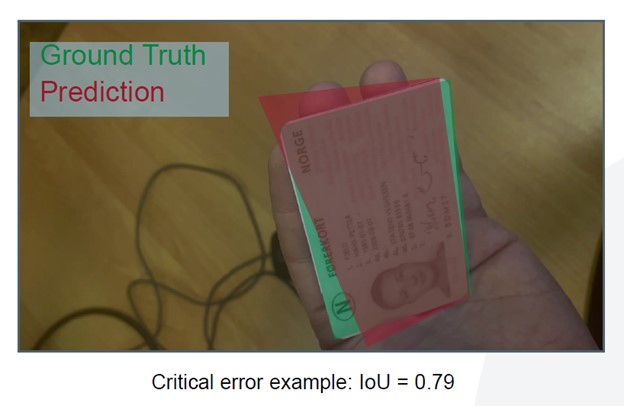
As there are no common metrics for quality in this process, we defined our own, choosing them according to their importance to our downstream model. The most straightforward way to estimate if two polygons are similar is to calculate intersection-over-union. It was crucial to minimize the number of critical errors, i.e., cases when the prediction is so bad that it later actually harms document recognition. Meanwhile, we found that minor errors, where intersection-over-union was close to 90 percent, were not important for document recognition quality.
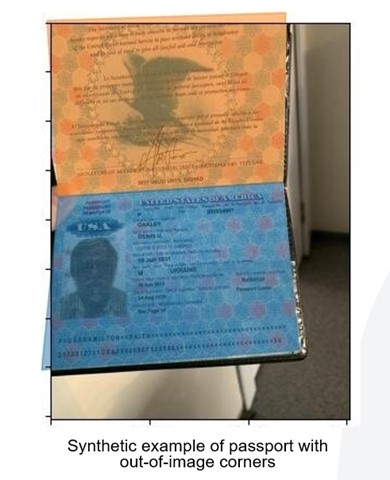
Unfortunately, we determined that projection estimation is not very effective in terms of critical errors. In the presence of critical errors, such as shown below, it becomes impossible for other models in our document processing pipeline to do their job well.
Loading component...
Subscribe for updates
Get updated on the latest insights and perspectives for business & technology leaders